🚀 Martian Terrain Segmentation - Notebook#
Quick Content Summary:
Loading the AI4Mars NASA dataset (Hugging Face:
hassanjbara/AI4MARS).Classes: soil, bedrock, sand, big rock (null pixels ignored).
Training a heavier weight Attention U-Net on Martian terrain labels
Distilling process to get a lightweight model with comparable performance
Evaluating pixel accuracy and mean IoU.
Visualizing predictions vs. ground truth.
Explainability:
Grad-CAM heatmaps.
Integrated Gradients saliency.
“Neural PCA” of intermediate feature activations.
Uncertainty:
showing th uncertainty of pictures as heatmap to check calibration
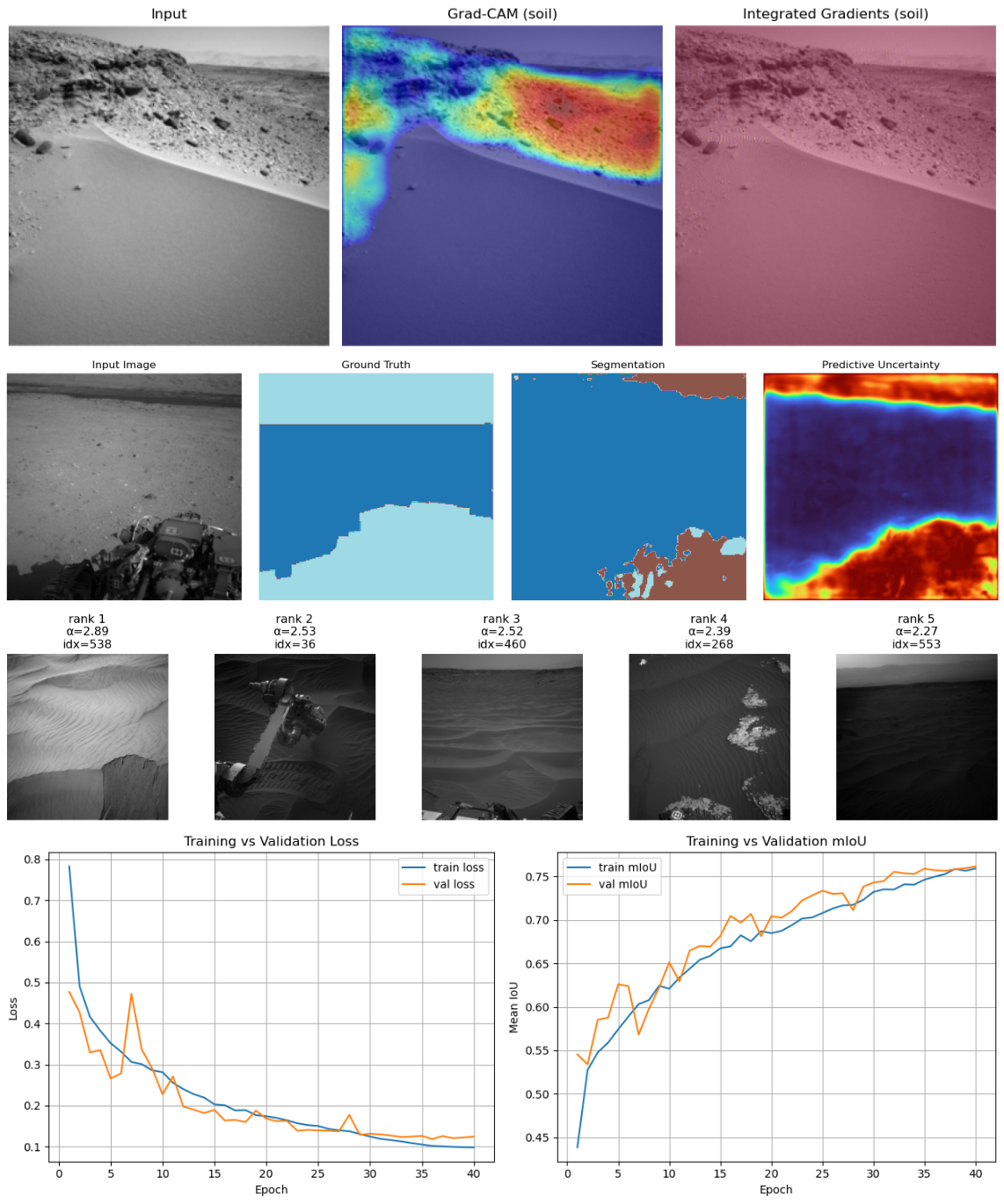
Here is a first glance on what you can expect:
A few things to say#
In the context of an ESA application I made this fun little semantic segmentation project. The goal is to get a good-performing lightweight model to do semantic segmentation on a Martian terrain dataset. Because the context here is to make a model that is aiding human interpretation of the data, I added some of my favorite methods from the realm of trustworthy machine learning. This offers explainability and interpretability of the model to be able to detect shortcuts or biases of the model in the attempt of opening the black box. I think these are essential in every case where we want to really trust the model and understand how and what it is actually learning. Keep in mind, none of these methods—especially when only using each of them alone—ever assures the right behavior of the model, but taken together they enable a good understanding and robustness.
This notebook will display only the higher-level concepts of the things that are implemented here. For the detailed code descriptions, look in the docs that can also be found here on the website. Also, the small discussions under the methods are kept short and surface-level and have this little anthropomorphizing style. This repo is for showing concepts in a comprehensive fun way. Of course, interpretability and the discussion of these methods goes much deeper and is a bit more complex, but this will suffice for now.
What will follow is a very typical PyTorch CNN pipeline, no magic there. I will add short explanations for the more non-standard interesting parts. The references can be found at the end along with an outlook on what’s still missing in my opinion (I will publish the incomplete version as I had only a few days to do this for the application).
This is just imports and training settings:
import os
import random
from pathlib import Path
import torch
import matplotlib.pyplot as plt
from martian_terrain_segmentation.models import create_unet
from martian_terrain_segmentation.dataloader import (
create_ai4mars_dataloaders,
AI4MARS_CLASS_NAMES,
AI4MARS_IGNORE_INDEX,
)
from martian_terrain_segmentation.optimizers import create_optimizer, create_cosine_scheduler_with_warmup
from martian_terrain_segmentation.train_utils import train_one_epoch, evaluate, save_checkpoint, load_checkpoint
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print("Using device:", device)
image_size = 256
batch_size = 10
num_workers = 4
num_classes = len(AI4MARS_CLASS_NAMES)
num_epochs = 40
use_muon = False
use_amp = True
out_dir = Path("./outputs")
out_dir.mkdir(exist_ok=True, parents=True)
seed = 42
random.seed(seed)
torch.manual_seed(seed)
if torch.cuda.is_available():
torch.cuda.manual_seed_all(seed)
Using device: cuda
/home/georg/miniconda3/envs/deep_learning_ex_1/lib/python3.12/site-packages/muon/_core/preproc.py:31: FutureWarning: `__version__` is deprecated, use `importlib.metadata.version('scanpy')` instead
if Version(scanpy.__version__) < Version("1.10"):
Here we load the data. You will have the options to load only small parts of the data with ‘max_train_sample, max_test_samples. Also there where a few images with differeing type that led to errors. When you are loading the data the first time from put scan_sporious=True to threw out these few images.
# Data: AI4Mars dataloaders (train/val/test)
loaders = create_ai4mars_dataloaders(
batch_size=batch_size,
image_size=image_size,
num_workers=num_workers,
val_fraction=0.1,
to_rgb=False,
seed=seed,
cache_dir="./data/hf_cache",
#max_train_samples=100,
#max_test_samples=50,
use_local_disk_copy=True,
local_disk_path="./data/ai4mars_hf_on_disk",
scan_spurious=False,
valid_indices_cache_dir="./data/ai4mars_valid_indices",
)
train_loader = loaders.train
val_loader = loaders.val
test_loader = loaders.test
print(
f"Train batches: {len(train_loader)}, "
f"Val batches: {len(val_loader)}, "
f"Test batches: {len(test_loader)}"
)
[AI4MarsHFDataset] Loaded 13018 valid indices from cache: ./data/ai4mars_valid_indices/valid_indices_train.npy
[AI4MarsHFDataset] Loaded 1449 valid indices from cache: ./data/ai4mars_valid_indices/valid_indices_val.npy
[AI4MarsHFDataset] Loaded 1597 valid indices from cache: ./data/ai4mars_valid_indices/valid_indices_test.npy
Train batches: 1302, Val batches: 145, Test batches: 160
1. The Attention U-Net (Teacher Model)#
The Attention U-Net extends the classical U-Net by modulating skip connections using attention gates (AG).
This helps suppress irrelevant features and highlight important spatial structures.
🔍 1.1 Attention Gate (Mathematical Overview)#
Given encoder feature map \(x \in \mathbb{R}^{F_l \times H \times W}\)
and decoder gating signal \(g \in \mathbb{R}^{F_g \times H' \times W'}\):
Linear transforms:
Align feature map sizes (interpolation)
Combine:
Produce attention mask:
Apply gating:
This mask blocks irrelevant encoder features and emphasizes important ones (e.g., rock boundaries).
Why Attention Helps#
Selects semantically relevant spatial details
Avoids passing noise (e.g., rover artifacts)
Improves fine structure segmentation
Stronger gradients passed through skip connections
Reference:
Attention U-Net: Learning Where to Look for the Pancreas
https://arxiv.org/abs/1804.03999
Creating a even more powerful model (future work in internship maybe)#
There is still a few tricks available how to get much more out of the mostly sparse data resources that I can not try out until the deadline due to a combination limited time and compute resources:
1. Training a Backbone and Then Fine-Tuning#
Research suggests that much of the workload of models in computer vision lies in learning feature maps of images and modelling the manifold on which those feature maps live. In practice this means that we can pre-train on a much broader dataset that is similar, and then fine-tune on our real data. In our case, this would mean taking a large image-segmentation dataset, converting it to greyscale and segmentation format (if it is not already), and then pre-training. Afterwards we use our real data to fine-tune the model that has already learned the feature maps for our segmentation task.
For example, the paper A Contrast with ImageNet Preserves Model Rankings (2024) introduces the dataset named ImageNot. The authors show that even in the worst-case scenario—where we pre-train on classes with no overlap and on non-curated images—the pre-training dataset still yields useful feature representations for downstream tasks.
2. Data Augmentation#
We can easily multiply the amount of high-quality data via augmentation. Techniques like vertical/horizontal flips, noise insertion, or small affine transformations preserve the label and most of the image quality, thereby generating significantly more high-quality datapoints. This will likely improve performance—but we must double-check whether we inadvertently introduce biases by doing so. Luckily we have our explainability methods below at hand.
from martian_terrain_segmentation.models import create_teacher_unet
teacher_learning_rate = 1e-4
teacher_weight_decay = 1e-2
# Initializing the teacher model
teacher = create_teacher_unet(
in_channels=1,
num_classes=num_classes,
base_channels=64,
bilinear=True,
).to(device)
teacher_optimizer = create_optimizer(
teacher,
lr=teacher_learning_rate,
weight_decay=teacher_weight_decay,
use_muon=use_muon,
)
teacher_scheduler = create_cosine_scheduler_with_warmup(
teacher_optimizer,
num_warmup_steps=int(0.1 * num_epochs * len(train_loader)),
num_training_steps=num_epochs * len(train_loader),
)
[optimizers] Using NAdam (NadamW-style) optimizer.
history_teacher = {
"train_loss": [],
"train_miou": [],
"val_loss": [],
"val_miou": [],
}
# Training loop for the teacher model
best_teacher_miou = -1.0
for epoch in range(1, num_epochs + 1):
train_metrics = train_one_epoch(
model=teacher,
dataloader=train_loader,
optimizer=teacher_optimizer,
device=device,
num_classes=num_classes,
use_amp=use_amp,
use_tqdm=True,
epoch=epoch,
num_epochs=num_epochs,
scheduler=teacher_scheduler,
)
val_metrics = evaluate(
model=teacher,
dataloader=val_loader,
device=device,
num_classes=num_classes,
use_tqdm=True,
)
if val_metrics["miou"] > best_teacher_miou:
best_teacher_miou = val_metrics["miou"]
save_checkpoint(
path="checkpoints/best_teacher.pt",
model=teacher,
optimizer=teacher_optimizer,
scheduler=teacher_scheduler,
epoch=epoch,
metrics={"val_miou": best_teacher_miou},
)
history_teacher["train_loss"].append(train_metrics["loss"])
history_teacher["train_miou"].append(train_metrics["miou"])
history_teacher["val_loss"].append(val_metrics["loss"])
history_teacher["val_miou"].append(val_metrics["miou"])
print(
f" Train - loss: {train_metrics['loss']:.4f}, "
f"mIoU: {train_metrics['miou']:.4f}, "
f"pix acc: {train_metrics['pixel_acc']:.4f}"
)
print(
f" Val - loss: {val_metrics['loss']:.4f}, "
f"mIoU: {val_metrics['miou']:.4f}, "
f"pix acc: {val_metrics['pixel_acc']:.4f}"
)
'history_teacher = {\n "train_loss": [],\n "train_miou": [],\n "val_loss": [],\n "val_miou": [],\n}\n# Training loop for the teacher model\nbest_teacher_miou = -1.0\n\nfor epoch in range(1, num_epochs + 1):\n train_metrics = train_one_epoch(\n model=teacher,\n dataloader=train_loader,\n optimizer=teacher_optimizer,\n device=device,\n num_classes=num_classes,\n use_amp=use_amp,\n use_tqdm=True,\n epoch=epoch,\n num_epochs=num_epochs,\n scheduler=teacher_scheduler,\n )\n\n val_metrics = evaluate(\n model=teacher,\n dataloader=val_loader,\n device=device,\n num_classes=num_classes,\n use_tqdm=True,\n )\n\n if val_metrics["miou"] > best_teacher_miou:\n best_teacher_miou = val_metrics["miou"]\n save_checkpoint(\n path="checkpoints/best_teacher.pt",\n model=teacher,\n optimizer=teacher_optimizer,\n scheduler=teacher_scheduler,\n epoch=epoch,\n metrics={"val_miou": best_teacher_miou},\n )\n history_teacher["train_loss"].append(train_metrics["loss"])\n history_teacher["train_miou"].append(train_metrics["miou"])\n history_teacher["val_loss"].append(val_metrics["loss"])\n history_teacher["val_miou"].append(val_metrics["miou"])\n\n print(\n f" Train - loss: {train_metrics[\'loss\']:.4f}, "\n f"mIoU: {train_metrics[\'miou\']:.4f}, "\n f"pix acc: {train_metrics[\'pixel_acc\']:.4f}"\n )\n print(\n f" Val - loss: {val_metrics[\'loss\']:.4f}, "\n f"mIoU: {val_metrics[\'miou\']:.4f}, "\n f"pix acc: {val_metrics[\'pixel_acc\']:.4f}"\n )'
# Plot training curves
import os
import pandas as pd
# Find repo root (directory of this notebook file)
repo_root = os.path.abspath(".") # if running notebook from repo root
# read in the history in the showcase scenario because it takes an hour of time to train with my resources
csv_path = os.path.join(repo_root, "../outputs", "teacher_training_history.csv")
print("Loading:", csv_path)
history_teacher = pd.read_csv(csv_path)
epochs = range(1, num_epochs + 1)
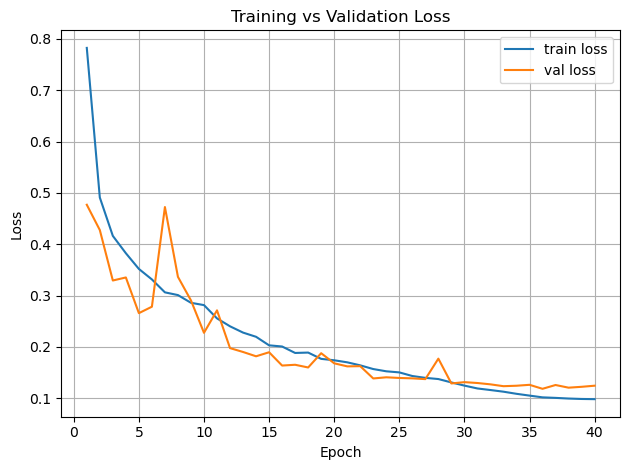
plt.figure()
plt.plot(epochs, history_teacher["train_loss"], label="train loss")
plt.plot(epochs, history_teacher["val_loss"], label="val loss")
plt.xlabel("Epoch")
plt.ylabel("Loss")
plt.legend()
plt.title("Training vs Validation Loss")
plt.grid(True)
plt.tight_layout()
plt.show()
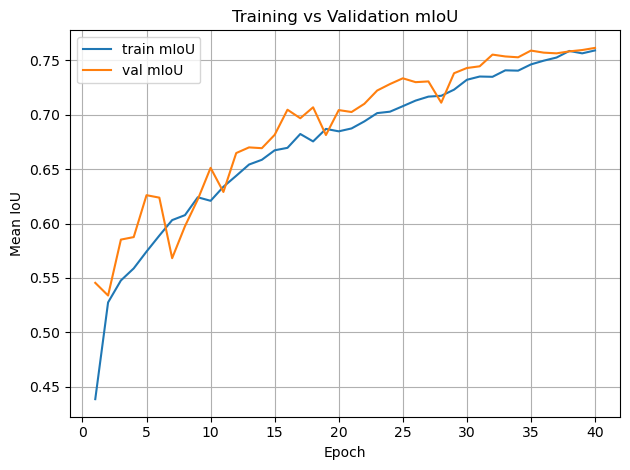
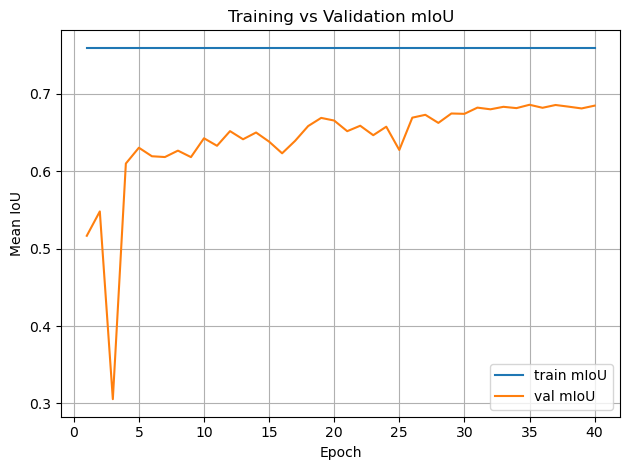
plt.figure()
plt.plot(epochs, history_teacher["train_miou"], label="train mIoU")
plt.plot(epochs, history_teacher["val_miou"], label="val mIoU")
plt.xlabel("Epoch")
plt.ylabel("Mean IoU")
plt.legend()
plt.title("Training vs Validation mIoU")
plt.grid(True)
plt.tight_layout()
plt.show()
Loading: /home/georg/Documents/ESA/Maritan-Terrain-Sematic-Segmentation/docs/../outputs/teacher_training_history.csv
teacher = create_teacher_unet(
in_channels=1,
num_classes=num_classes,
base_channels=64,
bilinear=True,
).to(device)
teacher_checkpoint_path = os.path.join(repo_root, "../checkpoints", "best_teacher.pt")
load_checkpoint(
path=teacher_checkpoint_path,
model=teacher,
optimizer=None,
scheduler=None,
map_location=device,
)
teacher.eval()
for p in teacher.parameters():
p.requires_grad = False
/home/georg/Documents/ESA/Maritan-Terrain-Sematic-Segmentation/src/martian_terrain_segmentation/train_utils.py:421: FutureWarning: You are using `torch.load` with `weights_only=False` (the current default value), which uses the default pickle module implicitly. It is possible to construct malicious pickle data which will execute arbitrary code during unpickling (See https://github.com/pytorch/pytorch/blob/main/SECURITY.md#untrusted-models for more details). In a future release, the default value for `weights_only` will be flipped to `True`. This limits the functions that could be executed during unpickling. Arbitrary objects will no longer be allowed to be loaded via this mode unless they are explicitly allowlisted by the user via `torch.serialization.add_safe_globals`. We recommend you start setting `weights_only=True` for any use case where you don't have full control of the loaded file. Please open an issue on GitHub for any issues related to this experimental feature.
checkpoint = torch.load(path, map_location=map_location)
[checkpoint] Loaded model weights from /home/georg/Documents/ESA/Maritan-Terrain-Sematic-Segmentation/docs/../checkpoints/best_teacher.pt
2. Knowledge Distillation (Teacher → Student)#
We train:
A large Attention U-Net → high accuracy
A small U-Net → efficient, lightweight
But instead of training the small model directly on labels, we distill the knowledge from the teacher.
2.1 Why Distillation Works Better Than Raw Labels#
The teacher provides rich, structured information that one-hot labels do not.
Soft Targets Contain Class Similarities#
Define soft teacher probabilities:
This reveals:
Soil pixels that are slightly “sand-like”
Bedrock with high uncertainty boundaries
Ambiguous transitions between materials
Benefits:#
Avoids overconfidence
Improves generalization
Provides smoother decision boundaries
Encodes class relationships
Student mimics teacher’s entire function, not just datasets
2.2 Distillation Loss for Segmentation#
We combine supervised CE + KL divergence:
Final:
Reference:
Distilling the Knowledge in a Neural Network
https://arxiv.org/abs/1503.02531
from martian_terrain_segmentation.distillation import SegmentationKDLoss
epoch_student = 30
teacher_learning_rate = 1e-4
teacher_weight_decay = 1e-2
student_learning_rate = 5e-4
student_weight_decay = 5e-2
# Initializing student model and knowledge distillation setup
# load pretrained teacher (frozen)
teacher = create_teacher_unet(
in_channels=1,
num_classes=num_classes,
base_channels=64,
bilinear=True,
).to(device)
teacher_checkpoint_path = os.path.join(repo_root, "../checkpoints", "best_teacher.pt")
load_checkpoint(teacher_checkpoint_path, model=teacher, optimizer=None, scheduler=None, map_location=device)
teacher.eval()
for p in teacher.parameters():
p.requires_grad = False
# fresh student
student = create_unet(
in_channels=1,
num_classes=num_classes,
base_channels=16,
bilinear=True,
).to(device)
optimizer = create_optimizer(
student,
lr=student_learning_rate,
weight_decay=student_weight_decay,
use_muon=use_muon,
)
scheduler = create_cosine_scheduler_with_warmup(
optimizer,
num_warmup_steps=int(0.1 * num_epochs * len(train_loader)),
num_training_steps=num_epochs * len(train_loader),
)
kd_loss_fn = SegmentationKDLoss(
ignore_index=AI4MARS_IGNORE_INDEX,
alpha=0.5,
T=2.0,
)
[checkpoint] Loaded model weights from /home/georg/Documents/ESA/Maritan-Terrain-Sematic-Segmentation/docs/../checkpoints/best_teacher.pt
[optimizers] Using NAdam (NadamW-style) optimizer.
from tqdm import tqdm
best_student_miou = -1.0
history = {
"train_loss": [],
"train_miou": [],
"val_loss": [],
"val_miou": [],
}
for epoch_student in range(1, num_epochs + 1):
print(f"\n[Distillation] Epoch {epoch_student}/{num_epochs}")
student.train()
if use_amp:
scaler = torch.cuda.amp.GradScaler(enabled=True)
else:
scaler = None
running_loss = 0.0
total_samples = 0
pbar = tqdm(train_loader, desc=f"KD Train {epoch_student}/{num_epochs}", unit="batch", leave=False)
for imgs, masks in pbar:
imgs = imgs.to(device, non_blocking=True).float()
masks = masks.to(device, non_blocking=True).long()
batch_size = imgs.size(0)
total_samples += batch_size
optimizer.zero_grad(set_to_none=True)
with torch.no_grad():
teacher_logits = teacher(imgs)
if use_amp:
with torch.cuda.amp.autocast():
student_logits = student(imgs)
loss = kd_loss_fn(student_logits, teacher_logits, masks)
scaler.scale(loss).backward()
scaler.step(optimizer)
scaler.update()
else:
student_logits = student(imgs)
loss = kd_loss_fn(student_logits, teacher_logits, masks)
loss.backward()
optimizer.step()
if scheduler is not None:
scheduler.step()
running_loss += loss.item() * batch_size
avg_loss = running_loss / max(total_samples, 1)
pbar.set_postfix(loss=f"{avg_loss:.3f}")
# eval student
val_metrics = evaluate(
model=student,
dataloader=val_loader,
device=device,
num_classes=num_classes,
use_tqdm=True,
)
if val_metrics["miou"] > best_student_miou:
best_student_miou = val_metrics["miou"]
save_checkpoint(
path="checkpoints/best_student_kd.pt",
model=student,
optimizer=optimizer,
scheduler=scheduler,
epoch=epoch_student,
metrics={"val_miou": best_student_miou},
)
#history["train_loss"].append(train_metrics["loss"])
#history["train_miou"].append(train_metrics["miou"])
history["val_loss"].append(val_metrics["loss"])
history["val_miou"].append(val_metrics["miou"])
#print(
# f" Train - loss: {train_metrics['loss']:.4f}, "
# f"mIoU: {train_metrics['miou']:.4f}, "
# f"pix acc: {train_metrics['pixel_acc']:.4f}"
#)
print(
f" Val - loss: {val_metrics['loss']:.4f}, "
f"mIoU: {val_metrics['miou']:.4f}, "
f"pix acc: {val_metrics['pixel_acc']:.4f}"
)
print(
f" KD Val - loss: N/A, mIoU: {val_metrics['miou']:.4f}, pix acc: {val_metrics['pixel_acc']:.4f}"
)
'from tqdm import tqdm\nbest_student_miou = -1.0\nhistory = {\n "train_loss": [],\n "train_miou": [],\n "val_loss": [],\n "val_miou": [],\n}\n\nfor epoch_student in range(1, num_epochs + 1):\n print(f"\n[Distillation] Epoch {epoch_student}/{num_epochs}")\n student.train()\n\n if use_amp:\n scaler = torch.cuda.amp.GradScaler(enabled=True)\n else:\n scaler = None\n\n running_loss = 0.0\n total_samples = 0\n\n pbar = tqdm(train_loader, desc=f"KD Train {epoch_student}/{num_epochs}", unit="batch", leave=False)\n\n for imgs, masks in pbar:\n imgs = imgs.to(device, non_blocking=True).float()\n masks = masks.to(device, non_blocking=True).long()\n batch_size = imgs.size(0)\n total_samples += batch_size\n\n optimizer.zero_grad(set_to_none=True)\n\n with torch.no_grad():\n teacher_logits = teacher(imgs)\n\n if use_amp:\n with torch.cuda.amp.autocast():\n student_logits = student(imgs)\n loss = kd_loss_fn(student_logits, teacher_logits, masks)\n scaler.scale(loss).backward()\n scaler.step(optimizer)\n scaler.update()\n else:\n student_logits = student(imgs)\n loss = kd_loss_fn(student_logits, teacher_logits, masks)\n loss.backward()\n optimizer.step()\n\n if scheduler is not None:\n scheduler.step()\n\n running_loss += loss.item() * batch_size\n avg_loss = running_loss / max(total_samples, 1)\n pbar.set_postfix(loss=f"{avg_loss:.3f}")\n\n # eval student\n val_metrics = evaluate(\n model=student,\n dataloader=val_loader,\n device=device,\n num_classes=num_classes,\n use_tqdm=True,\n )\n\n if val_metrics["miou"] > best_student_miou:\n best_student_miou = val_metrics["miou"]\n save_checkpoint(\n path="checkpoints/best_student_kd.pt",\n model=student,\n optimizer=optimizer,\n scheduler=scheduler,\n epoch=epoch_student,\n metrics={"val_miou": best_student_miou},\n )\n\n history["train_loss"].append(train_metrics["loss"])\n history["train_miou"].append(train_metrics["miou"])\n history["val_loss"].append(val_metrics["loss"])\n history["val_miou"].append(val_metrics["miou"])\n\n print(\n f" Train - loss: {train_metrics[\'loss\']:.4f}, "\n f"mIoU: {train_metrics[\'miou\']:.4f}, "\n f"pix acc: {train_metrics[\'pixel_acc\']:.4f}"\n )\n print(\n f" Val - loss: {val_metrics[\'loss\']:.4f}, "\n f"mIoU: {val_metrics[\'miou\']:.4f}, "\n f"pix acc: {val_metrics[\'pixel_acc\']:.4f}"\n )\n print(\n f" KD Val - loss: N/A, mIoU: {val_metrics[\'miou\']:.4f}, pix acc: {val_metrics[\'pixel_acc\']:.4f}"\n )'
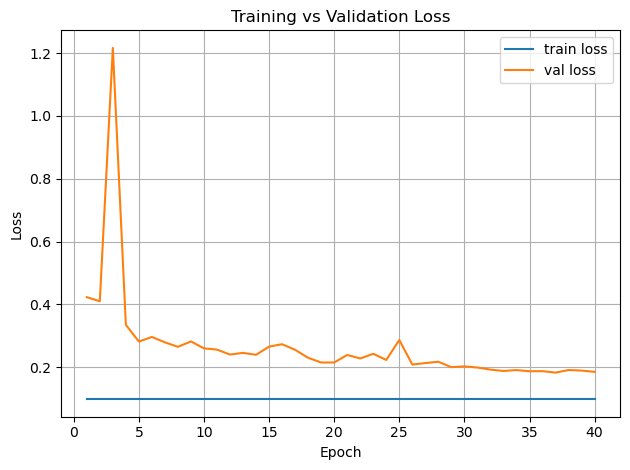
# Plot training curves
history = pd.read_csv(os.path.join(repo_root, "../outputs", "student_kd_training_history.csv"))
epochs = range(1, num_epochs + 1)
plt.figure()
plt.plot(epochs, history["train_loss"], label="train loss")
plt.plot(epochs, history["val_loss"], label="val loss")
plt.xlabel("Epoch")
plt.ylabel("Loss")
plt.legend()
plt.title("Training vs Validation Loss")
plt.grid(True)
plt.tight_layout()
plt.show()
plt.figure()
plt.plot(epochs, history["train_miou"], label="train mIoU")
plt.plot(epochs, history["val_miou"], label="val mIoU")
plt.xlabel("Epoch")
plt.ylabel("Mean IoU")
plt.legend()
plt.title("Training vs Validation mIoU")
plt.grid(True)
plt.tight_layout()
plt.show()
student_checkpoint_path = os.path.join(repo_root, "../checkpoints", "best_student_kd.pt")
info = load_checkpoint(
path=student_checkpoint_path,
model=student,
optimizer=optimizer,
scheduler=scheduler,
map_location=device,
)
print("Restored from epoch:", info["epoch"])
print("Stored metrics:", info["metrics"])
[checkpoint] Loaded model weights from /home/georg/Documents/ESA/Maritan-Terrain-Sematic-Segmentation/docs/../checkpoints/best_student_kd.pt
[checkpoint] Restored optimizer state.
[checkpoint] Restored scheduler state.
Restored from epoch: 35
Stored metrics: {'val_miou': 0.685755849025393}
/home/georg/Documents/ESA/Maritan-Terrain-Sematic-Segmentation/src/martian_terrain_segmentation/train_utils.py:421: FutureWarning: You are using `torch.load` with `weights_only=False` (the current default value), which uses the default pickle module implicitly. It is possible to construct malicious pickle data which will execute arbitrary code during unpickling (See https://github.com/pytorch/pytorch/blob/main/SECURITY.md#untrusted-models for more details). In a future release, the default value for `weights_only` will be flipped to `True`. This limits the functions that could be executed during unpickling. Arbitrary objects will no longer be allowed to be loaded via this mode unless they are explicitly allowlisted by the user via `torch.serialization.add_safe_globals`. We recommend you start setting `weights_only=True` for any use case where you don't have full control of the loaded file. Please open an issue on GitHub for any issues related to this experimental feature.
checkpoint = torch.load(path, map_location=map_location)
# Evaluate on test set
test_metrics = evaluate(
model=student,
dataloader=test_loader,
device=device,
num_classes=num_classes,
)
print("\nTest metrics:")
print(
f" loss: {test_metrics['loss']:.4f}, "
f"mIoU: {test_metrics['miou']:.4f}, "
f"pix acc: {test_metrics['pixel_acc']:.4f}"
)
Test metrics:
loss: 0.2051, mIoU: 0.6811, pix acc: 0.9398
import matplotlib.pyplot as plt
from matplotlib.colors import ListedColormap, BoundaryNorm
AI4MARS_CLASS_VALUES = [0, 1, 2, 3, 255]
AI4MARS_CLASS_NAMES = ["soil", "bedrock", "sand", "big_rock", "null"]
AI4MARS_COLORS = [
(0.6, 0.4, 0.2), # soil
(0.5, 0.5, 0.5), # bedrock
(0.9, 0.8, 0.3), # sand
(0.2, 0.2, 0.2), # big_rock
(0.0, 0.0, 0.0), # null (black)
]
cmap = ListedColormap(AI4MARS_COLORS)
# boundaries define the bin edges for class mapping
boundaries = [ -0.5, 0.5, 1.5, 2.5, 3.5, 255 + 0.5 ]
norm = BoundaryNorm(boundaries, cmap.N)
def decode_mask(t):
return t.cpu().numpy()
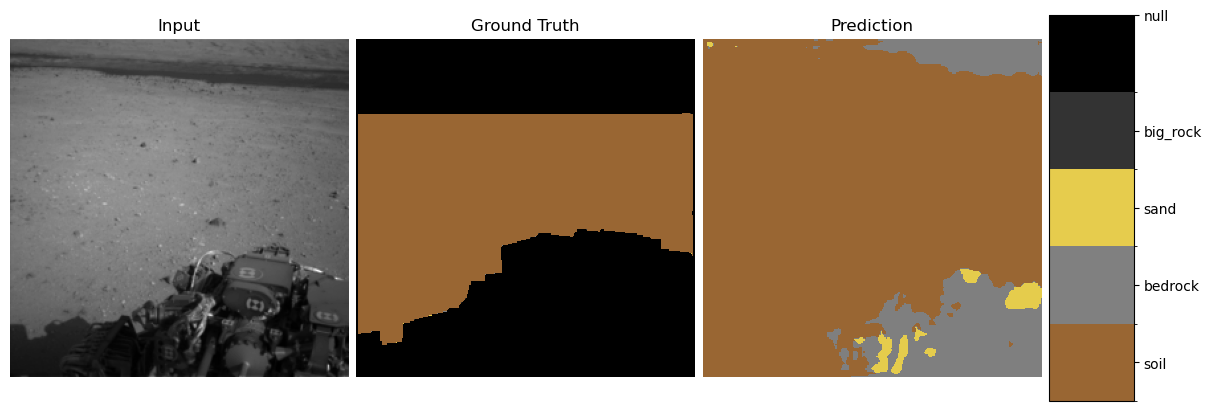
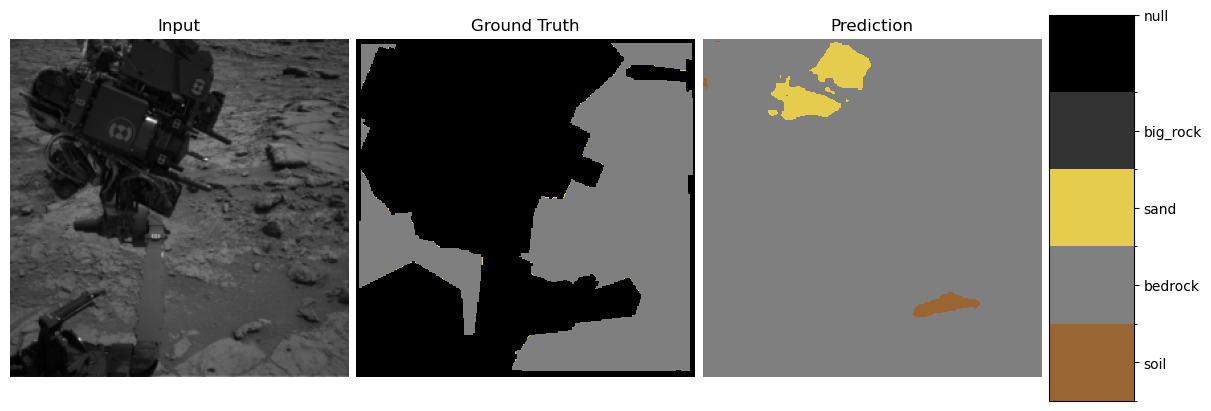
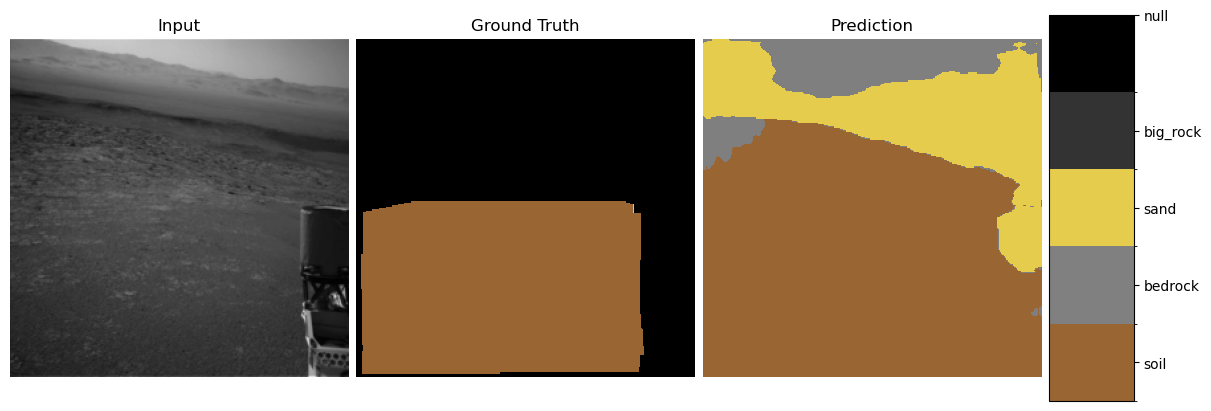
def show_predictions(model, dataloader, num_examples=3):
model.eval()
imgs, masks = next(iter(dataloader))
imgs = imgs.to(device)
masks = masks.to(device)
with torch.no_grad():
logits = model(imgs)
preds = logits.argmax(1)
for i in range(min(num_examples, imgs.size(0))):
img = imgs[i, 0].cpu().numpy()
gt = masks[i].cpu().numpy()
pred = preds[i].cpu().numpy()
fig = plt.figure(figsize=(12, 4), constrained_layout=True)
gs = fig.add_gridspec(1, 4, width_ratios=[1.2, 1.2, 1.2, 0.3])
ax0 = fig.add_subplot(gs[0, 0])
ax1 = fig.add_subplot(gs[0, 1])
ax2 = fig.add_subplot(gs[0, 2])
cax = fig.add_subplot(gs[0, 3])
ax0.imshow(img, cmap="gray")
ax0.set_title("Input")
ax0.axis("off")
im1 = ax1.imshow(gt, cmap=cmap, norm=norm)
ax1.set_title("Ground Truth")
ax1.axis("off")
im2 = ax2.imshow(pred, cmap=cmap, norm=norm)
ax2.set_title("Prediction")
ax2.axis("off")
cb = fig.colorbar(im2, cax=cax, ticks=AI4MARS_CLASS_VALUES)
cb.ax.set_yticklabels(AI4MARS_CLASS_NAMES)
plt.show()
show_predictions(student, test_loader, num_examples=3)
3. Explainability Methods#
We use three orthogonal explanation tools.
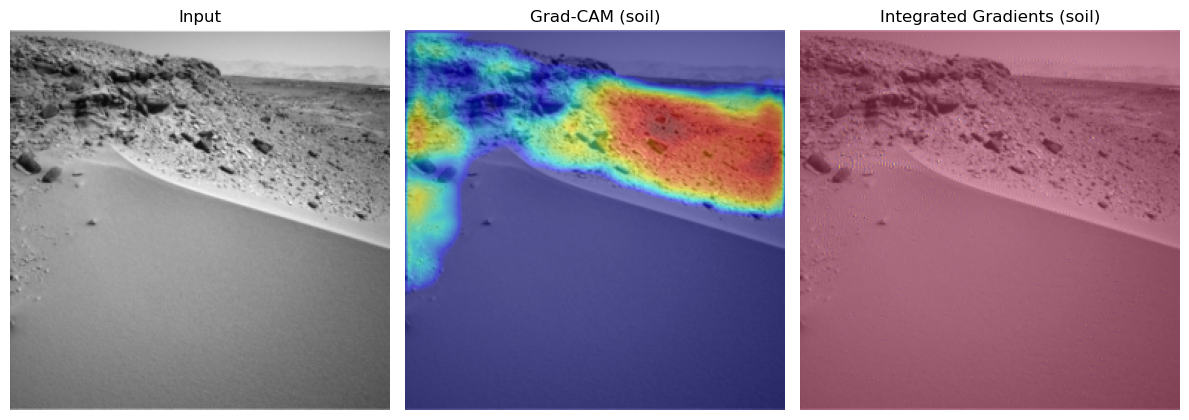
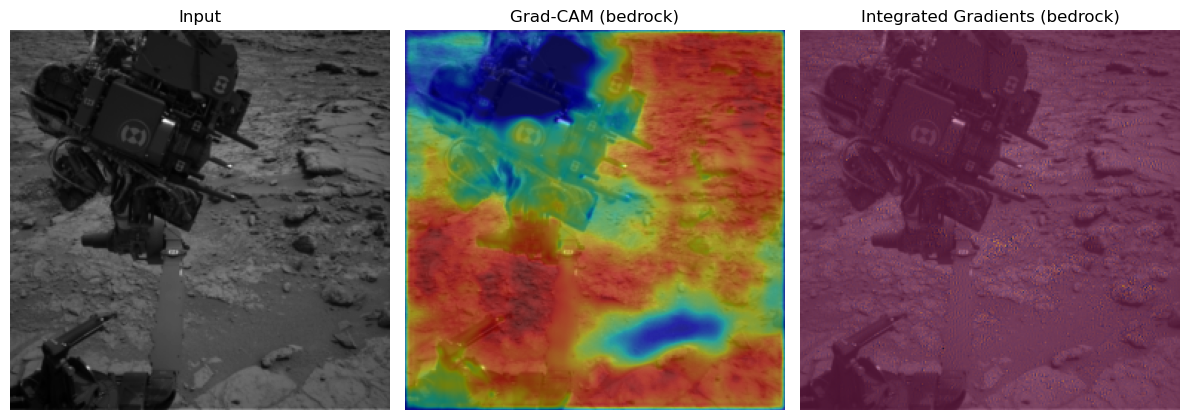
3.1 Grad-CAM for Segmentation#
Grad-CAM highlights spatial regions responsible for class activation.
For class \(c\), compute gradients:
Then:
This produces a heatmap overlay revealing where the model “looked”.
Reference:
https://arxiv.org/abs/1610.02391
3.2 Integrated Gradients (IG)#
IG attributes importance via a path integral from a baseline to the input:
Strengths:
Avoids gradient saturation
Provides fine-grained pixel-level attribution
Reference:
https://arxiv.org/abs/1703.01365
# Explainability demo:
# Grad-CAM, Integrated Gradients, Neural PCA for a single test image.
from martian_terrain_segmentation.explainability import explain_per_class_examples
num_examples_per_class = 1
ig_steps = 32
explain_per_class_examples(
model=student,
dataset=test_loader.dataset,
device=device,
num_examples_per_class=num_examples_per_class,
ig_steps=ig_steps,
)
Scanning dataset once to find examples per class...
=== Class 'soil' (id=0) | 3 total examples, showing 1 ===
- Example 1: dataset idx 3
=== Class 'bedrock' (id=1) | 1 total examples, showing 1 ===
- Example 1: dataset idx 1
=== Class 'sand' (id=2) | 1 total examples, showing 1 ===
- Example 1: dataset idx 3

=== Class 'big_rock' (id=3) | 1 total examples, showing 1 ===
- Example 1: dataset idx 3
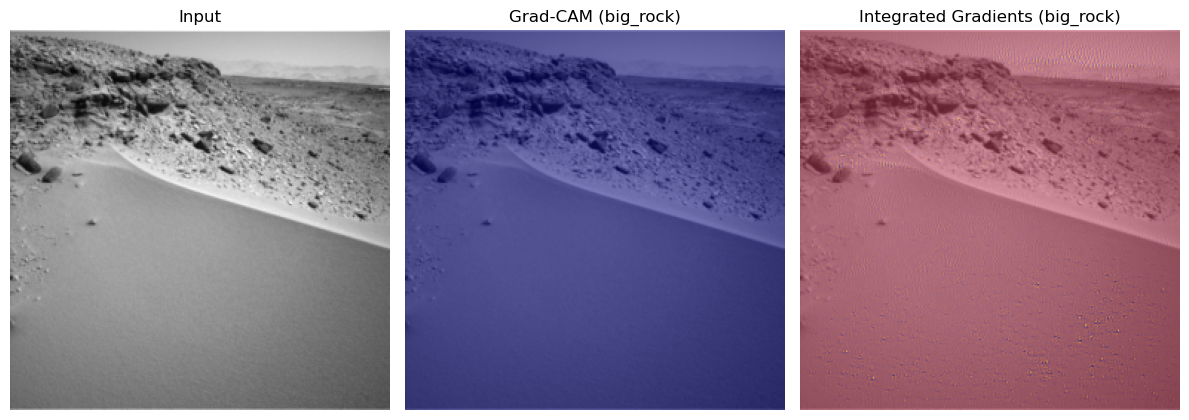
Cam & Integrated Gradient Conclusion:#
You see very nice behaviour for the classes soil and bedrock. Here the correct regions seem to be activated and there are now obvious biases. Especially the fact that the model tends to ignore the mars rover in the bedrock one is a good sign for the models understanding of this class. For the sand we might see small potential problems. There seems to be a tendency for the model to may confuse the sky for being sand.
The integrated gradients are not very informative in this setting. This could be due to the not very slient nature of these pictures and their classes. If anything you could see small input gradient activations in the sky again for the sand class.
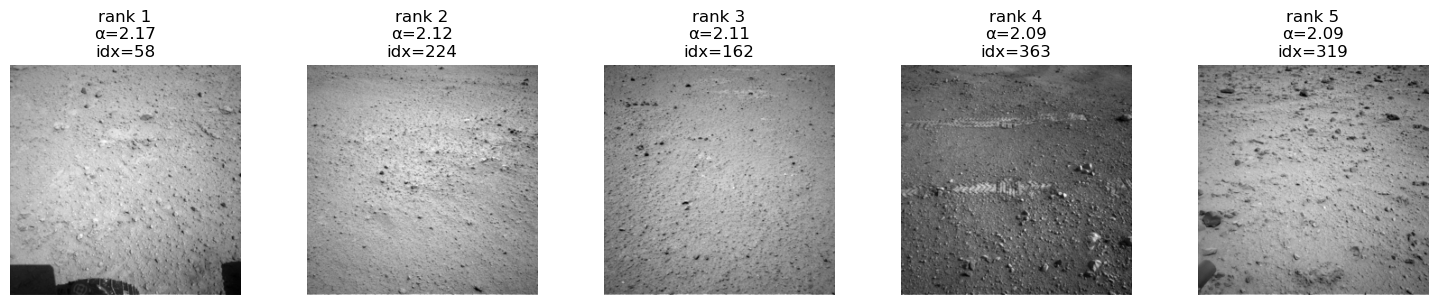
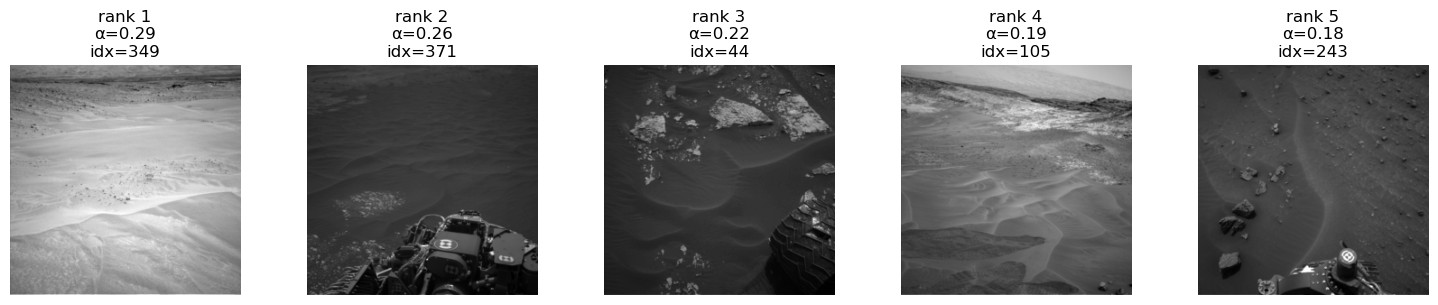
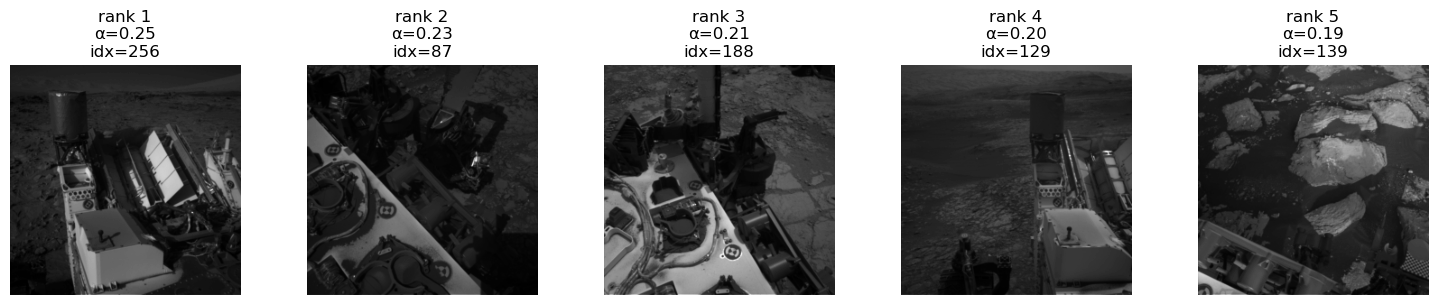
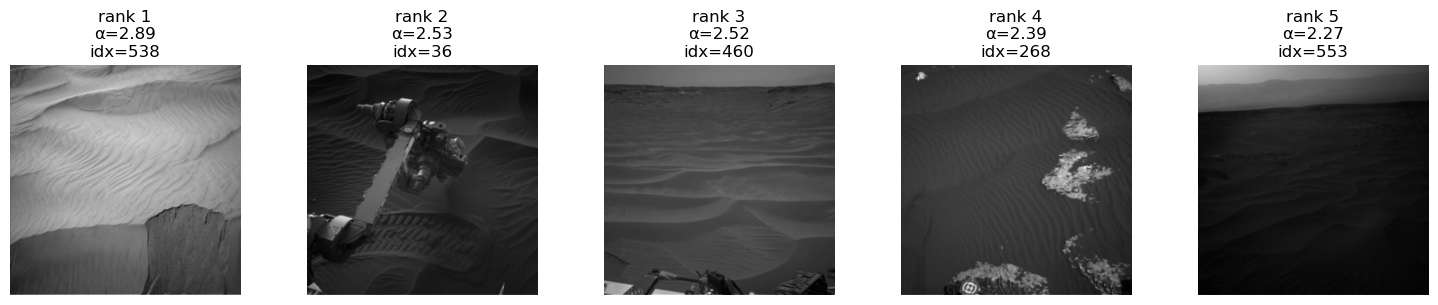
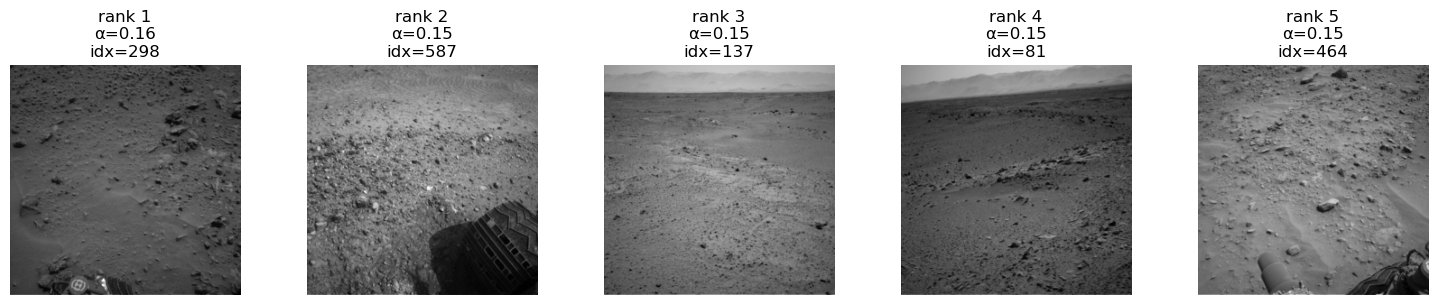
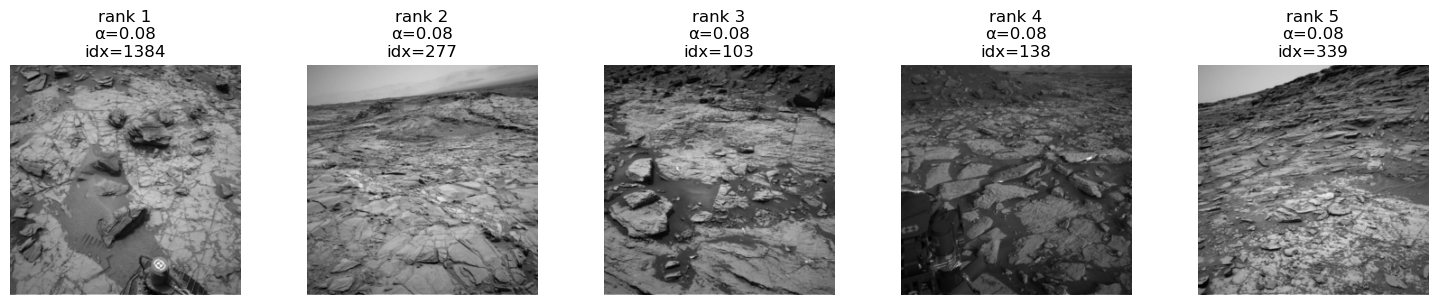
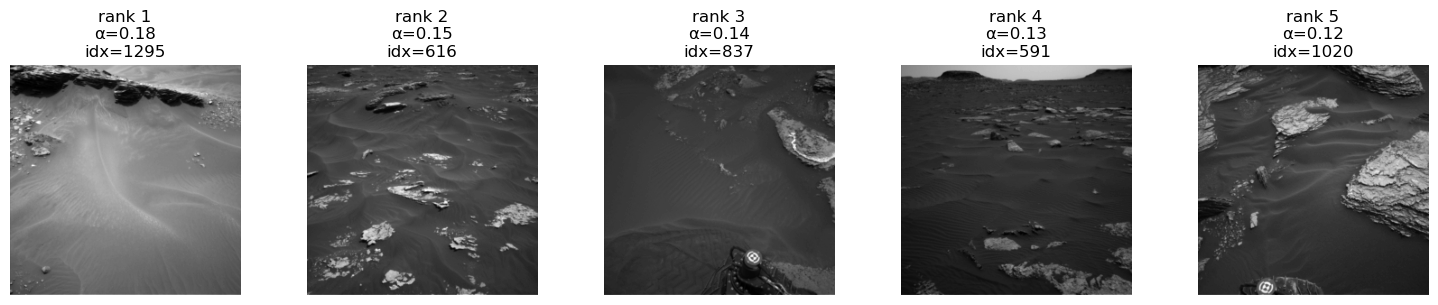
3.3 Neural PCA Activations#
Neural PCA Activations reveals the principal axes of variation in the feature space of each terrain class and how they contribute to the class logit.
It follows the class-wise neural PCA formulation from the Statistical Machine Learning lecture.
We define:
Penultimate feature vector
\[ \phi(x) \in \mathbb{R}^D \]Classifier weight vector for class (c)
\[ w_c \in \mathbb{R}^D \]Class-specific embedding
\[ \psi_c(x) = w_c \odot \phi(x) \in \mathbb{R}^D \]
For each class \(c\), we:
Collect all samples \(x_i\) whose segmentation mask contains class \(c\).
Compute the class-specific embeddings \(\psi_c(x_i)\).
Compute their mean
\[ \bar{\psi}_c = \frac{1}{N} \sum_{i=1}^N \psi_c(x_i) \]and the covariance matrix of \(\{\psi_c(x_i)\}_{i=1}^N\).
Perform PCA on this covariance matrix to obtain eigenvectors
\[ v_\ell \in \mathbb{R}^D, \quad \ell = 1,\dots,L \]and eigenvalues \(\lambda_\ell\).
Each centered embedding expands in the PCA basis:
The logit of class (c) is
where \(\mathbf{1} = (1,\dots,1)^\top\).
Using the PCA decomposition:
The contribution of PCA component \(\ell\) to the class-\(c\) logit is
Outputs per class \(c\):
Principal directions \(v_\ell\) in feature space
Eigenvalues \(\lambda_\ell\)
Component scores \(\alpha_\ell^{(c)}(x)\)
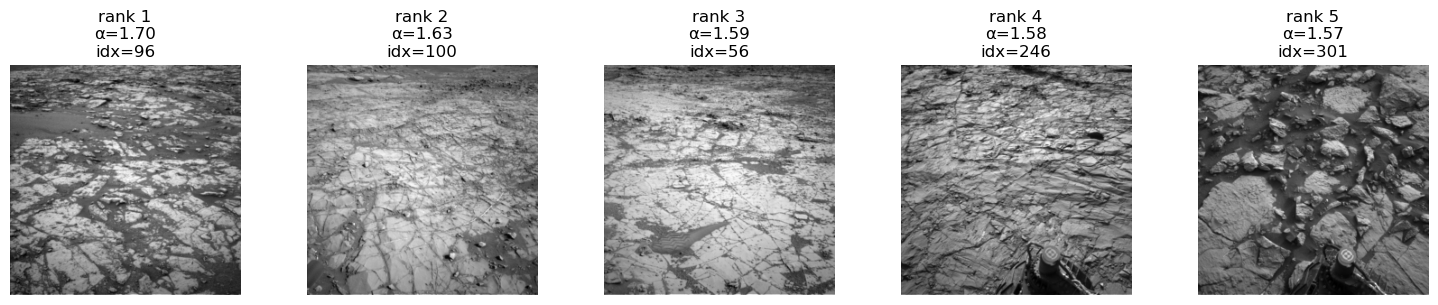
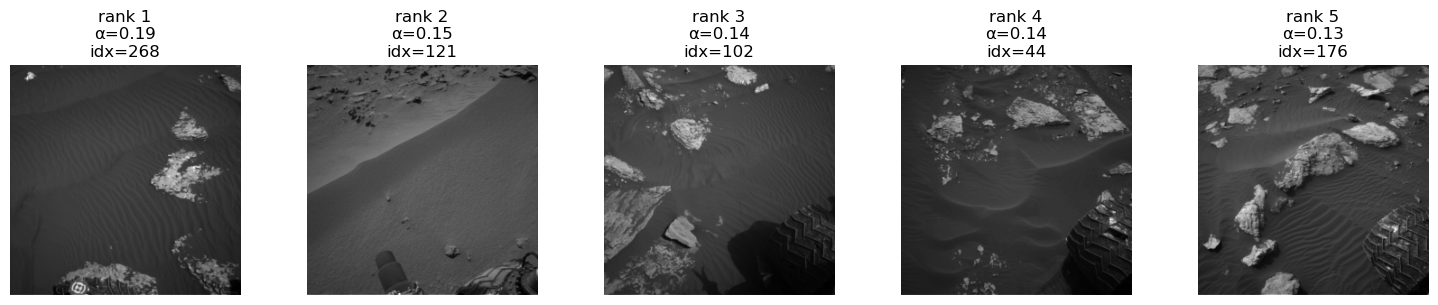
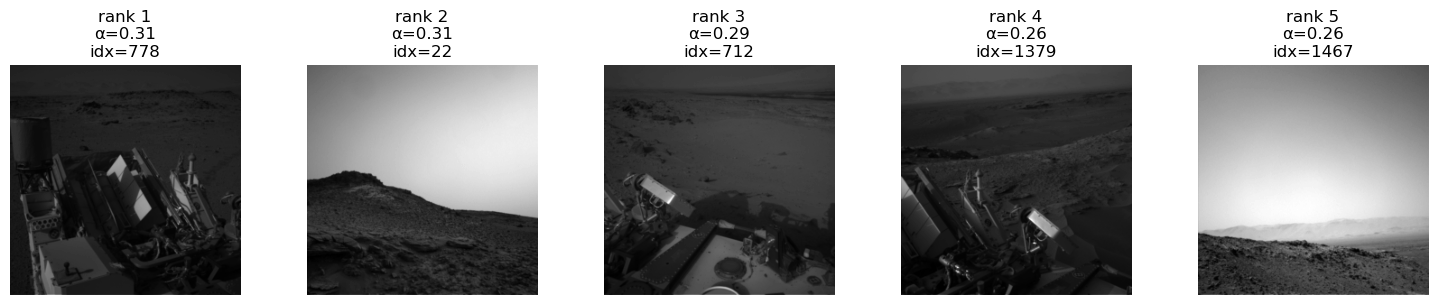
Top-activating real images (“eigenpictures”)
These eigenpictures show what the model “thinks” defines each terrain class, revealing shortcut or spurious features driving the class logit.
from martian_terrain_segmentation.explainability import compute_class_neural_pca_features, show_top_neural_pca_images_for_class
class_ids = list(range(len(AI4MARS_CLASS_NAMES))) # [0,1,2,3]
max_samples_per_class = 200
n_pca_components = 3
neural_pca_results = compute_class_neural_pca_features(
model=student,
dataset=train_loader.dataset, # usually use TRAIN set like in the paper
device=device,
class_ids=class_ids,
max_samples_per_class=max_samples_per_class,
n_components=n_pca_components,
min_per_class=10,
)
for c in range(len(AI4MARS_CLASS_NAMES)):
for comp in range(3): # top 3 NPCA components
show_top_neural_pca_images_for_class(
neural_pca_results,
dataset=train_loader.dataset,
class_id=c,
component_idx=comp,
top_k=5,
)
show_top_neural_pca_images_for_class(
neural_pca_results,
dataset=train_loader.dataset,
class_id=-1,
component_idx=1,
top_k=5,
)
[neural PCA] Scanning dataset for class presence...
[neural PCA] Class 0: using 200 samples.
[neural PCA] Class 1: using 200 samples.
[neural PCA] Class 2: using 200 samples.
[neural PCA] Class 3: using 200 samples.
[neural PCA] Class 4: 0 samples < min_per_class.
Class 'soil' (id=0), PCA component 1, showing top 5/200 images.
Class 'soil' (id=0), PCA component 2, showing top 5/200 images.
Class 'soil' (id=0), PCA component 3, showing top 5/200 images.
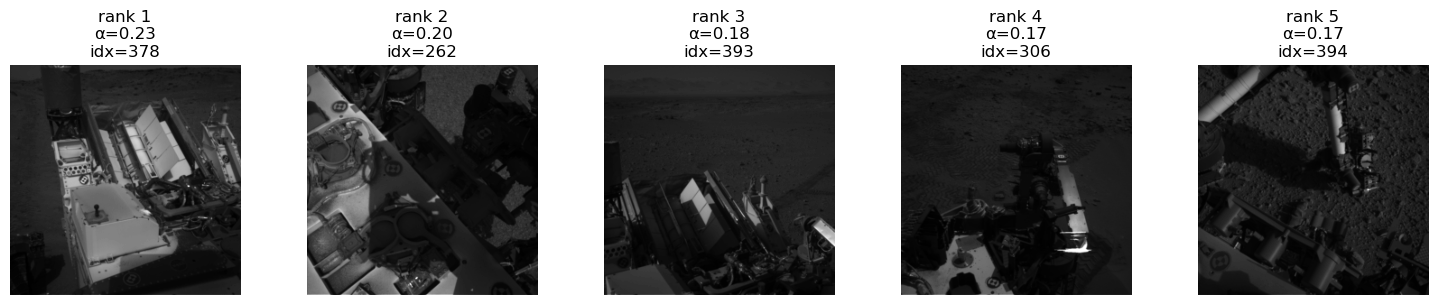
Class 'bedrock' (id=1), PCA component 1, showing top 5/200 images.
Class 'bedrock' (id=1), PCA component 2, showing top 5/200 images.
Class 'bedrock' (id=1), PCA component 3, showing top 5/200 images.
Class 'sand' (id=2), PCA component 1, showing top 5/200 images.
Class 'sand' (id=2), PCA component 2, showing top 5/200 images.
Class 'sand' (id=2), PCA component 3, showing top 5/200 images.
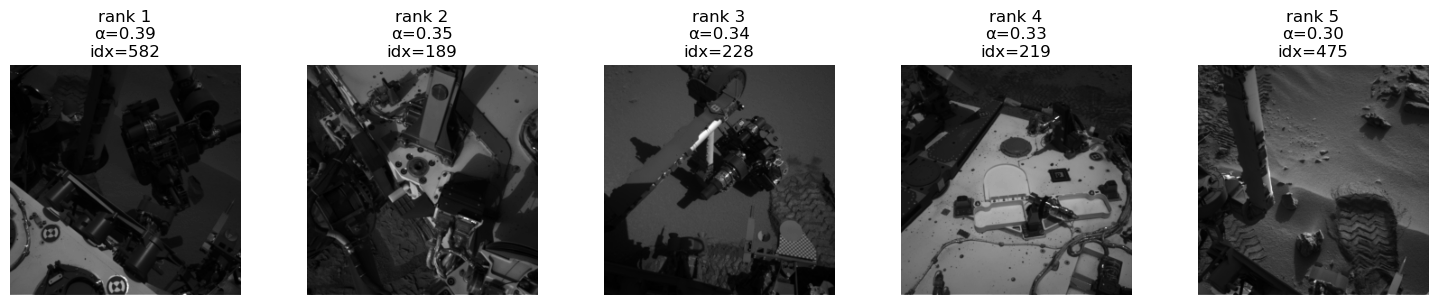
Class 'big_rock' (id=3), PCA component 1, showing top 5/200 images.
Class 'big_rock' (id=3), PCA component 2, showing top 5/200 images.
Class 'big_rock' (id=3), PCA component 3, showing top 5/200 images.
No neural PCA info for class 4.
No neural PCA info for class 4.
No neural PCA info for class 4.
Class 'astronaut' (id=4), PCA component 1, showing 1 / 1 images.

Neural PCA Conclusion:#
Overall we see a very nice behaviour of the model for each class for the first two components repectively. In all the classes we see that for the third compenent we have large parts of the ground being covered by the rover. This means that the rover is part of the representation of the images. This is an issue. Because it is not the first component it is not that bad and this is then probably not a simplicity bias. If we could fix this with a bias model and HSIC regularization term on the target model. There are ways to potentially fix this, but these would require chages to losses and or architectures and remain as future work for now.
In the last component you see another weird behaviour of the model. It is an OOD class. Might be an potential candidate for an internship though.
4. Uncertainty Estimation#
We consider both:
Aleatoric uncertainty → noise in data
Epistemic uncertainty → lack of knowledge (model uncertainty)
4.1 Aleatoric Uncertainty (Heteroscedastic)#
Modify model to output logits \(z\) and per-pixel variance \(\sigma^2\):
Loss:
Large \(\sigma \Rightarrow\) pixel is inherently noisy.
Disclaimer:
Uncertainty disentanglement (splitting into aleatoric and epistemic) is a relatively new and actively debated topic.
Definitions of the subtypes vary across the literature, so do not treat the definitions here too strictly—they are meant for surface-level illustration in this showcase.
Reference:
https://arxiv.org/abs/1703.04977
from martian_terrain_segmentation.uncertainty import predictive_entropy, max_prob_uncertainty
student.eval()
imgs, masks = next(iter(test_loader))
imgs = imgs.to(device)
masks = masks.to(device)
with torch.no_grad():
logits = student(imgs)
preds = logits.argmax(dim=1)
# choose one example
idx = 0
img_np = imgs[idx, 0].cpu().numpy()
gt_np = masks[idx].cpu().numpy()
pred_np = preds[idx].cpu().numpy()
# uncertainty maps
entropy_map = predictive_entropy(logits)[idx].cpu().numpy()
maxprob_unc = max_prob_uncertainty(logits)[idx].cpu().numpy()
# normalize for display (optional)
def norm01(x):
x = x.astype("float32")
x_min, x_max = x.min(), x.max()
if x_max > x_min:
return (x - x_min) / (x_max - x_min)
return x * 0.0
entropy_disp = norm01(entropy_map)
maxprob_unc_disp = norm01(maxprob_unc)
fig, axes = plt.subplots(1, 4, figsize=(16, 4))
axes[0].imshow(img_np, cmap="gray")
axes[0].set_title("Input Image")
axes[0].axis("off")
axes[1].imshow(gt_np, cmap="tab20")
axes[1].set_title("Ground Truth")
axes[1].axis("off")
axes[2].imshow(pred_np, cmap="tab20")
axes[2].set_title("Segmentation")
axes[2].axis("off")
axes[3].imshow(entropy_disp, cmap="turbo") # or "inferno"
axes[3].set_title("Predictive Uncertainty")
axes[3].axis("off")
plt.tight_layout()
plt.show()
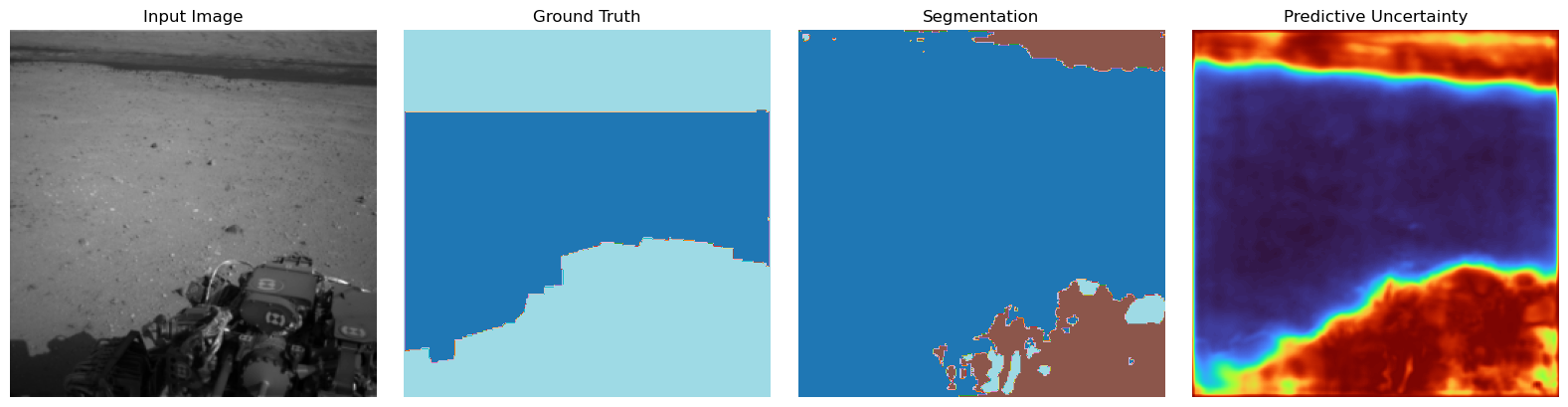
Aleatoric Uncertainty Conclusion:#
Here we see that the the uncerainty matches the regions at the predictions roughly. The edges could be a bit more aligned but we do not expect perfect behaviour when having a rather small dataset and a distilled model. One Problem that will arise here for pictures that might be OOD or soft-OOD (weird uncertainty people name for a covariate shift), basically meaning data more or less distict we will suffer from overconfidence. As we have ReLU activations there is the problematic tendency of the model to more confident in one class the more test picture will be away from the training data space. This is obviously wrong behaviour and can be fixed “being a bit Gaussian” (next part).
4.2 Epistemic Uncertainty — Laplace Approximation (Future Work)#
ReLU networks behave pathologically far from data
(Hennig & Hauberg: “being a bit Gaussian” helps).
Approximate posterior as Gaussian:
where \(H\) is the Hessian of the log-posterior.
Provides model uncertainty via parameter variance.
Reference:
https://arxiv.org/abs/2002.10118
5. Summary#
This project integrates:
A powerful Attention U-Net teacher
A fast, efficient student U-Net
Distillation for performance with small models
Multiple explainability tools
Uncertainty estimates (data & model)
This builds a deployment-ready perception pipeline for autonomous planetary exploration.